
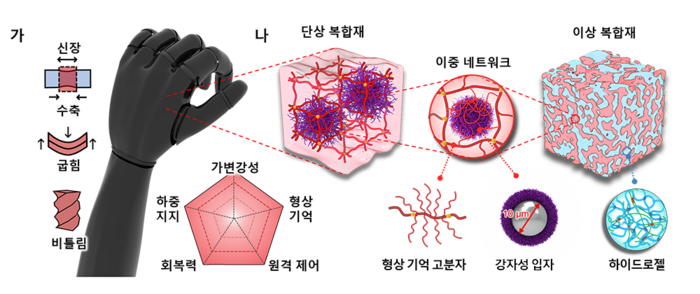
▲(그림1) 자성 복합 인공근육 및 소재 모식도 가. 자성 복합 근육의 개념을 나타내는 일러스트와 다기능적 특성. 나. 자성 복합 근육의 화학적 구조 설명. 단상 복합재는 형상 기억 고분자와 강자성 입자가 결합된 이중 네트워크 구조로 이루어졌으며, 여기에 하이드로젤이 혼합되면 이상 복합재가 된다. 이상 복합재의 경우 에너지 소산을 돕는 하이드로젤을 포함하고 있어 진동 감쇠를 위한 이중층 구조에 사용된다. (그림3 나 참고)
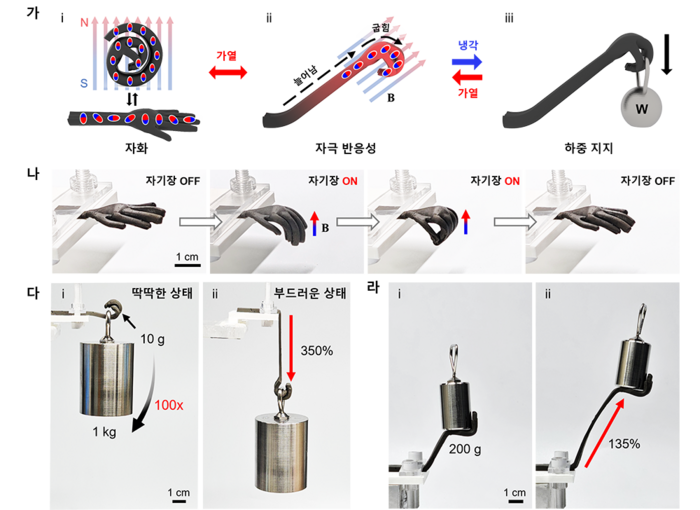
▲(그림2) 단상 복합재로 제작된 재구성 가능한 로봇 손 가. 단상 복합재로 제작된 로봇 손의 작동 메커니즘 모식도. 자화된 인공근육을 가열하면 부드러워져 자기장에 반응해 굽히거나 늘어날 수 있으며, 냉각하면 딱딱해져 무거운 물게도 견딜 수 있다. 나. 자기장 제어를 통해 로봇 손의 파지 능력을 보여주는 사진. 레이저 가열을 통해 고온의 부드러운 상태이다. 다. 자성 복합 근육의 뛰어난 하중지지 능력을 나타내는 사진. 딱딱한 상태에서는 자기 무게 대비 100배인 1kg의 무게를 견디고, 부드러운 상태에서는 파손 없이 350%까지 견딜 수 있다. 라. 135%까지 늘어난 상태에서도 수직 방향으로 200g의 무게를 파손 없이 견디는 사진.
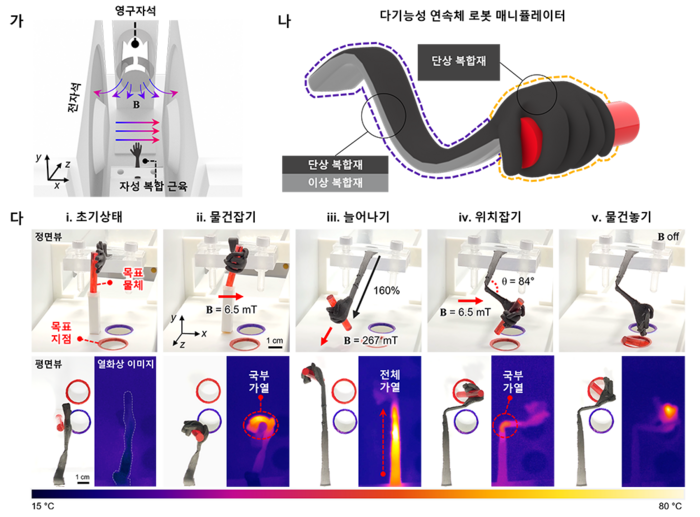
▲(그림3) 자기 복합 근육의 소프트 연속 로봇 적용 가. 로봇 매니퓰레이터를 제어하는 자기장 제어 시스템 모식도. 나. 다기능성 연속체 로봇 매니퓰레이터의 구조 모식도. 다. 로봇 매니퓰레이터의 복잡하고 연속적인 작동 동작을 수행하는 것을 보여주는 사진. 레이저를 이용한 선택적 국부가열을 통해 특정 부분만 부드러운 상태로 전환시켜 자기장에 반응할 수 있게 함으로써 다양한 동작을 수행할 수 있다. (그림 설명 및 제공 : 유니스트 정훈의 교수)
한국 연구진이 마치 고무처럼 유연하면서도 자동차 무게를 견딜 수 있는 인공근육을 개발했다. 이 기술은 소프트 로봇과 웨어러블 기기 등 다양한 분야에서 활용될 전망이다.
한국연구재단(이사장 이광복)은 10월 10일 UNIST(이하 울산과학기술원) 정훈의 교수 연구팀이 기존 형상 기억 고분자에 강자성 입자를 결합해 강성 변화율을 최대 2,700배 확대한 새로운 자성 복합 인공근육을 개발했다고 밝혔다. 이 인공근육은 부드러운 상태에서는 8배 이상 늘어나고 단단한 상태에서 하중지지 능력은 자기 무게 대비 최대 1,000배의 인장 응력과 3,690배의 압축 응력을 견딜 만큼 단단하다.
연구팀은 기존 소프트 로봇 액추에이터의 한계였던 약한 강성 문제를 극복하기 위해 강자성 입자를 사용했다. 이를 통해 외부 자기장에 빠르게 반응하고, 불필요한 진동을 줄이면서 정밀한 제어가 가능해졌다. 이번 연구 결과는 로봇, 생체의료기기, 웨어러블 장치 등 다양한 산업에서의 응용 가능성을 넓혔다.
정훈의 교수는 “이번 연구는 인공근육의 기계적 성능과 구동 성능을 크게 향상시켰다"며, “레이저 가열과 자기장 제어로 복잡한 동작을 원격으로 구현할 수 있어 다양한 분야에서 혁신적인 기술로 활용될 것"이라고 밝혔다.
이번 연구 성과는 과학기술정보통신부와 한국연구재단의 중견연구 지원사업으로 수행되었으며, 국제학술지 네이처 커뮤니케이션스에 게재되었다.

▲(왼쪽부터) 교신저자 정훈의 교수, 제1저자 성민호·선가현·김소미 (사진=유니스트)
■ 논문정보
-논문명 : Multifunctional Magnetic Muscles for Soft Robotics
-저널명 : Nature Communications
-키워드 : Soft robotics(소프트로봇), magnetic composite(자성복합소재), Variable Stiffness(가변강성), Shape memory polymer(형상기억고분자), Wireless control(원격 제어)
-DOI : https://www.nature.com/articles/s41467-024-52347-w
-저 자 : 정훈의 교수(교신저자/유니스트), 성민호(제1저자/유니스트), 선가현(제1저자/유니스트), 김소미(제1저자/유니스트), 권혁주(유니스트), 이상우(유니스트), 사라스 찬드라 비를라(Sarath Chandra Veerla, 유니스트), 강동관(유니스트), 김재일(유니스트), 스탈린 콘다비티(Stalin Kondaveeti, 유니스트), 살라 엠. 타우픽(Salah M. Tawfik, 유니스트), 박형욱 교수(교신저자/유니스트)

;){kind=link}